核心技术
Brain
++
新一代AI生产力平台
核心算法
研究院
产品
核心硬件
城市及企业级
AIoT应用计算一体机(旷视鸿图)
AIoT智能服务器(旷视幻方)
智能分析盒(旷视魔方)
人脸识别门禁一体机(旷视神行)
智能网络摄像机
智能身份核验终端
智能便携人像比对一体机
工业级
机器人及智能装备
平台软件
城市级
城市治理综合软件平台 (旷视万象)
企业级
AIoT视图综合应用平台 (旷视盘古)
AIoT智能物联商业云平台 (旷视九霄)
工业级
机器人仓储物流软件平台 (河图)
产品方案
城市级
旷视运动猿体育教育产品方案
解决方案
消费物联网
计算摄影解决方案
设备安全解决方案
FaceID人脸核身解决方案
城市物联网
智慧城市治理解决方案
旷视智能身份认证管理方案
智慧楼宇通行解决方案
智慧园区解决方案
供应链物联网
智慧大仓解决方案
智慧微仓解决方案
智慧物流园区解决方案
查看所有解决方案 >
行业
消费电子
泛互联网
智慧城市
智慧建筑
智慧金融
智慧物流
开发者
人工智能开放平台(Face++)
旷视天元深度学习框架(MegEngine)
关于旷视
公司介绍
负责任的AI
生态合伙人
合作案例
市场活动
新闻资讯
联系我们
加入旷视
400-6700-866
中
|
EN
核心技术
新一代AI生产力平台
核心算法
研究院
产品
核心硬件
城市及企业级
AIoT应用计算一体机(旷视鸿图)
AIoT智能服务器(旷视幻方)
智能分析盒(旷视魔方)
人脸识别门禁一体机(旷视神行)
智能网络摄像机
智能身份核验终端
智能便携人像比对一体机
工业级
机器人及智能装备
平台软件
城市级
城市治理综合软件平台 (旷视万象)
企业级
AIoT视图综合应用平台 (旷视盘古)
AIoT智能物联商业云平台 (旷视九霄)
工业级
机器人仓储物流软件平台 (河图)
产品方案
城市级
旷视运动猿体育教育产品方案
解决方案
消费物联网
计算摄影解决方案
设备安全解决方案
FaceID人脸核身解决方案
前往消费物联网
城市物联网
智慧城市治理解决方案
旷视智能身份认证管理方案
智慧楼宇通行解决方案
智慧园区解决方案
前往城市物联网
供应链物联网
智慧大仓解决方案
智慧微仓解决方案
智慧物流园区解决方案
前往供应链物联网
查看所有解决方案
行业
消费电子
泛互联网
智慧城市
智慧建筑
智慧金融
智慧物流
开发者
人工智能开放平台(Face++)
旷视天元深度学习框架(MegEngine)
关于旷视
公司介绍
负责任的AI
生态合伙人
合作案例
市场活动
新闻资讯
联系我们
加入旷视
语言
中
EN
400-6700-866
联系我们
NEXT
产业AIoT
旷视面向消费物联网、城市物联网、供应链物联网三大核心场景提供经验证的AIoT软硬一体化解决方案,广泛应用于互联网、金融、城市、交通、地产、物流等领域,助力行业的智能化升级和AI的商业化落地。
消费物联网
消费电子及SaaS场景应用
消费物联网
消费电子及SaaS场景应用
落地案例
旷视 x 美丽修行
赋能行业
泛互联网
消费电子
智慧金融
解决方案
设备安全解决方案
计算摄影解决方案
FaceStyle美业解决方案
查看更多
城市物联网
城市及建筑场景应用
城市物联网
城市及建筑场景应用
落地案例
旷视 x 海淀城市大脑
旷视 x 金隅智造工场
旷视 x 廊坊
查看更多
赋能行业
智慧建筑
智慧城市
解决方案
智能测温通行解决方案
智慧园区解决方案
智慧城市治理解决方案
供应链物联网
旷视机器人
供应链物联网
旷视机器人
落地案例
旷视 x 梦燕
旷视 x 徐福记
旷视 x 国控广州
查看更多
赋能行业
智慧物流
解决方案
智慧大仓解决方案
智慧微仓解决方案
智慧物流园区解决方案
聚焦三大领域
AI商业落地
消费物联网
消费电子及SaaS场景应用
城市物联网
城市及建筑场景应用
供应链物联网
旷视机器人
AIoT产品
源于Brain++强大的AI能力,旷视构建了完整的AIoT产品体系,包括AIoT操作系统、AI重新定义的硬件和AI重新定义的行业应用,实现了从IoT连接、数据处理、数字孪生到应用赋能的功能集成。
机器人及智能装备
应用于智慧微仓、智慧大仓和智慧园区三大场景
智慧物流操作系统“河图”
致力于将“机器人及智能装备”应用在“仓储、物流、制造和供应链”等行业场景
智慧建筑操作系统“旷视盘古”
关注城市微单元泛楼宇园区行业场景
人脸识别门禁一体机“旷视神行”
广泛应用于出入口通行、考勤、防疫测温、身份核验、消费等多种场景
智能分析盒“旷视魔方”
广泛应用于“楼宇园区、校园、社区”等领域
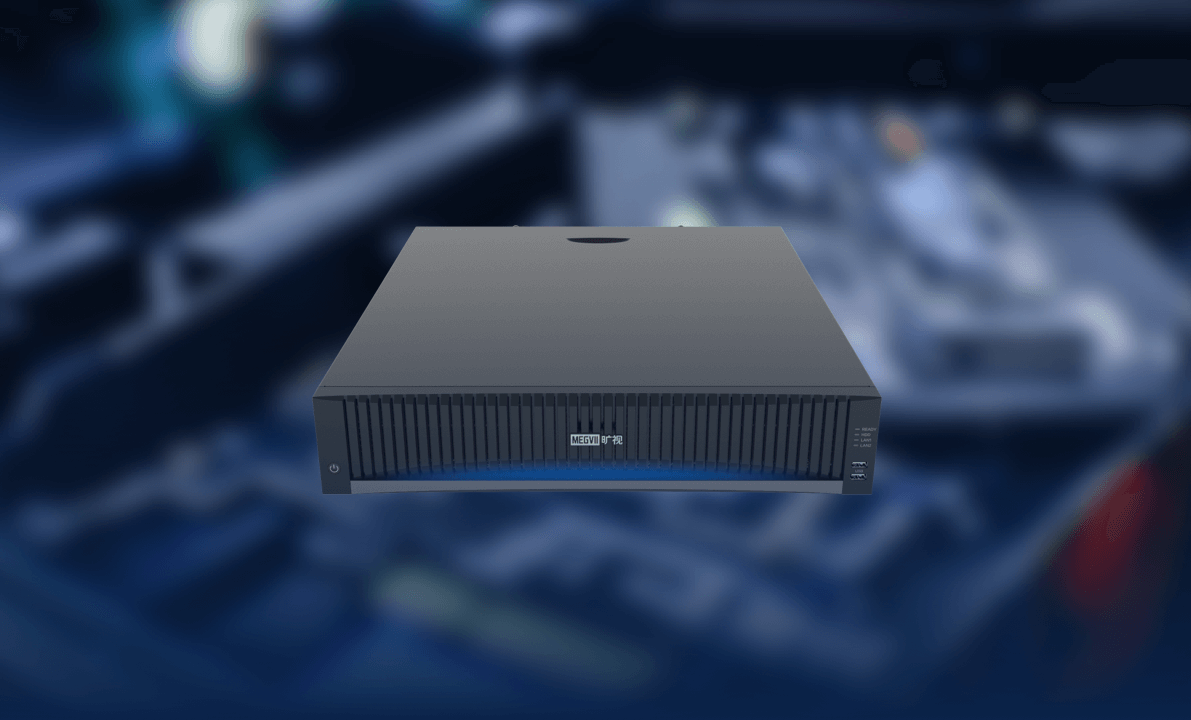
AIoT智能服务器“旷视幻方”
面向中心侧 AI 计算需求推出的高性能计算型服务器产品
AIoT计算应用一体机“旷视鸿图”
广泛应用于出办公楼宇、企事业园区、生产制作园区、校园、社区等多种场景
智能网络摄像机
可用于“人员、机动车与非机动车检测及街道城市管控”等各类复杂场景的综合应用
AIoT产品
源于Brain++强大的AI能力,旷视构建了完整的AIoT产品体系,包括AIoT操作系统、AI重新定义的硬件和AI重新定义的行业应用,实现了从IoT连接、数据处理、数字孪生到应用赋能的功能集成。
机器人及智能装备
智慧物流操作系统
“河图”
智慧建筑操作系统
“旷视盘古”
人脸识别门禁一体机
“旷视神行”
智能分析盒
“旷视魔方”
AIoT智能服务器
“旷视幻方”
AIoT计算应用一体机
“旷视鸿图”
智能网络摄像机
AI生产力平台
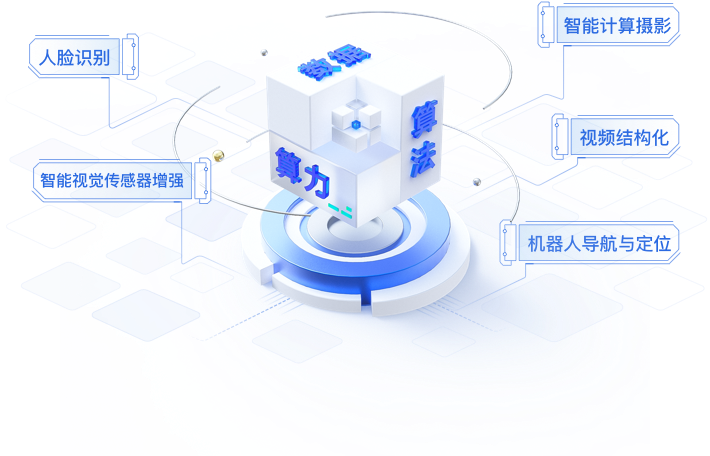
旷视自研AI生产力平台Brain++,由三部分构成,MegEngine(算法)提供算法的训练、推理和部署能力;MegCompute(算力)具备算力的共享、调度和分布式能力;MegData(数据)拥有全面的数据处理、管理和安全能力。Brain++覆盖从AI生产(输出算法模型)到应用(实现算法工程化封装)各环节,有效解决AI研发门槛高、成本高和效率低的问题。
旷视自研AI生产力平台Brain++,覆盖从AI生产(输出算法模型)到应用(实现算法工程化封装)各环节,有效解决AI研发门槛高、成本高和效率低的问题。
了解详情
了解详情
公司动态
新闻资讯
展会活动
社会责任
查看更多
2023-06-13
西安交通大学与旷视科技获批共建人机混合增强智能全国重点实验室
2023-05-05
国内首张!旷视四向车系统获CE全指令认证
2023-05-29
2023中关村论坛|旷视聚焦“AI in Physical”,让AI向实而生
2023.3
视界无疆 共启新征
2022.7.15
2022旷视技术开放日
2022.4.13
视界无疆 空间共生
《正确使用人工智能产品倡议书》
《人工智能技术合规应用指引》
公司动态
新闻资讯
展会活动
社会责任
2023-06-13
西安交通大学与旷视科技获批共建人机混合增强智能全国重点实验室
2023-05-05
国内首张!旷视四向车系统获CE全指令认证
2023-05-29
2023中关村论坛|旷视聚焦“AI in Physical”,让AI向实而生
查看全部
2023.3
视界无疆 共启新征
2022.7.15
2022旷视技术开放日
2022.4.13
视界无疆 空间共生
查看全部
《正确使用人工智能产品倡议书》
《人工智能技术合规应用指引》
联系我们
获取尊享服务
专业的产品介绍,一对一客户服务
联系我们
联系我们
获取尊享服务
专业的产品介绍,一对一客户服务
联系我们
联系我们
售前咨询
在线咨询
联系在线客服,了解产品详情(工作日9:00-18:00)
商务合作
业务需求、落地场景、所需产品功能咨询
商务合作
业务需求、落地场景、所需产品功能咨询
400-6700-866
工作日9:00-18:00
售后服务
线上咨询
如已购买智慧城市、企业通行产品,专业售后团队为您服务 (工作日9:00-18:00)
自助提交工单
自行线上注册,登陆后自助提交工单,随时跟进处理进程
自助提交工单
自行线上注册,登陆后自助提交工单,随时跟进处理进程
400-6060-004
7*24小时












































 旷视MEGVII
旷视MEGVII 旷视城市大脑
旷视城市大脑 旷视企业服务
旷视企业服务 旷视机器人
旷视机器人 旷视Face++
旷视Face++ 旷视研究院
旷视研究院 旷视招聘
旷视招聘 旷视视频号
旷视视频号 旷视知乎
旷视知乎 旷视微博
旷视微博









